Темы кодификатора ЕГЭ: работа силы, мощность, кинетическая энергия, потенциальная энергия, закон сохранения механической энергии.
Мы приступаем к изучению энергии - фундаментального физического понятия. Но предварительно нужно разобраться с другой физической величиной - работой силы.
Работа.
Пусть на тело действует постоянная сила и тело, двигаясь прямолинейно по горизонтальной поерхности, совершило перемещение . Сила не обязательно является непосредственной причиной перемещения (так, сила тяжести не является непосредственной причиной перемещения шкафа, который передвигают по комнате).
Предположим сначала, что векторы силы и перемещения сонаправлены (рис. 1 ; остальные силы, действующие на тело, не указаны)
 |
| Рис. 1.A=Fs |
В этом простейшем случае работа определяется как произведение модуля силы на модуль перемещения:
. (1)
Единицей измерения работы служит джоуль (Дж): Дж=Н м. Таким образом, если под действием силы 1 Н тело перемещается на 1 м, то сила совершает работу 1 Дж.
Работа силы, перпендикулярной перемещению, по определению считается равной нулю. Так, в данном случае сила тяжести и сила реакции опоры не совершают работы.
Пусть теперь вектор силы образует с вектором перемещения острый угол (рис. 2 ).
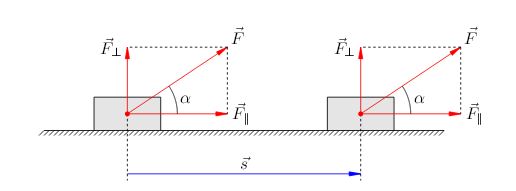 |
| Рис. 2. A=Fs cos |
Разложим силу на две составляющие: (параллельную перемещению) и (перпендикулярную перемещению). Работу совершает только . Поэтому для работы силы получаем:
. (2)
Если вектор силы образует с вектором перемещения тупой угол , то работа по-прежнему определяется формулой (2) . В этом случае работа оказывается отрицательной.
Например, работа силы трения скольжения, действующей на тело в рассмотренных ситуациях, будет отрицательной, так как сила трения направлена противоположно перемещению. В этом случае имеем:
И для работы силы трения получаем:
где - масса тела, - коэффициент трения между телом и опорой.
Соотношение (2) означает, что работа является скалярным произведением векторов силы и перемещения:
Это позволяет вычислять работу через координаты данных векторов:
Пусть на тело действуют несколько сил и - равнодействующая этих сил. Для работы силы имеем:
где - работы сил . Итак, работа равнодействующей приложенных к телу сил равна сумме работ каждой силы в отдельности.
Мощность.
Часто имеет значение быстрота, с которой совершается работа. Скажем, на практике важно знать, какую работу сможет выполнить данное устройство за фиксированное время.
Мощность - это величина, характеризующая скорость совершения работы. Мощность есть отношение работы ко времени , за которое эта работа совершена:
Мощность измеряется в ваттах (Вт). 1 Вт = 1 Дж/с, то есть 1 Вт - это такая мощность, при которой работа в 1 Дж совершается за 1 с.
Предположим, что силы, действующие на тело, уравновешены, и тело движется равномерно и прямолинейно со скоростью . В этом случае существует полезная формула для мощности, развиваемой одной из действующих сил .
За время тело совершит перемещение . Работа силы будет равна:
Отсюда получаем мощность:
где -угол между векторами силы и скорости.
Наиболее часто эта формула используется в ситуации, когда - сила "тяги" двигателя автомобиля (которая на самом деле есть сила трения ведущих колёс о дорогу). В этом случае , и мы получаем просто:
Механическая энергия.
Энергия является мерой движения и взаимодействия любых объектов в природе. Имеются различные формы энергии: механическая, тепловая, электромагнитная, ядерная. . .
Опыт показывает, что энергия не появляется ниоткуда и не исчезает бесследно, она лишь переходит из одной формы в другую. Это самая общая формулировка закона сохранения энергии .
Каждый вид энергии представляет собой некоторое математическое выражение. Закон сохранения энергии означает, что в каждом явлении природы определённая сумма таких выражений остаётся постоянной с течением времени.
Измеряется энергия в джоулях, как и работа.
Механическая энергия является мерой движения и взаимодействия механических объектов (материальных точек, твёрдых тел).
Мерой движения тела является кинетическая энергия . Она зависит от скорости тела. Мерой взаимодействия тел является потенциальная энергия. Она зависит от взаимного расположения тел.
Механическая энергия системы тел равна сумме кинетической энергии тел и потенциальной энергии их взаимодействия друг с другом.
Кинетическая энергия.
Кинетической энергией тела (принимаемого за материальную точку) называется величина
где - масса тела, - его скорость.
Кинетической энергией системы из тел называется сумма кинетических энергий каждого тела:
Если тело движется под действием силы , то кинетическая энергия тела, вообще говоря, меняется со временем. Оказывается, именение кинетической энергии тела за некоторый промежуток времени равно работе силы . Покажем это для случая прямолинейного равноускоренного движения.
Пусть - начальная скорость, - конечная скорость тела. Выберем ось вдоль траектории тела (и, соответственно, вдоль вектора силы ). Для работы силы получаем:
(мы воспользовались формулой для , выведенной в статье "Равноускоренное движение"). Заметим теперь, что в данном случае проекция скорости отличается от модуля скорости разве что знаком; поэтому и . В результате имеем:
что и требовалось.
На самом деле соотношение справедливо и в самом общем случае криволинейного движения под действием переменной силы.
Теорема о кинетической энергии. Изменение кинетической энергии тела равно работе, совершённой приложенными к телу внешними силами за рассматриваемый промежуток времени.
Если работа внешних сил положительна, то кинетическая энергия увеличивается ( class="tex" alt="\Delta K>0">, тело разгоняется).
Если работа внешних сил отрицательна, то кинетическая энергия уменьшается (, тело замедляет движение). Пример - торможение под действием силы трения, работа которой отрицательна.
Если же работа внешних сил равна нулю, то кинетическая энергия тела за это время не меняется. Нетривиальный пример - равномерное движение по окружности, совершаемое грузом на нити в горизонтальной плоскости. Сила тяжести, сила реакции опоры и сила натяжения нити всегда перпендикулярны скорости, и работа каждой из этих сил равна нулю в течение любого промежутка времени. Соответственно, кинетическая энергия груза (а значит, и его скорость) остаётся постоянной в процессе движения.
Задача. Автомобиль едет по горизонтальной дороге со скоростью и начинает резко тормозить. Найти путь , пройденный автомобилем до полной остановки, если коэффициент трения шин о дорогу равен .
Решение. Начальная кинетическая энергия автомобиля , конечная кинетическая энергия . Изменение кинетической энергии .
На автомобиль действуют сила тяжести , реакция опоры и сила трения . Сила тяжести и реакция опоры, будучи перпендикулярны перемещению автомобиля, работы не совершают. Работа силы трения:
Из теоремы о кинетической энергии теперь получаем:
Потенциальная энергия тела вблизи поверхности Земли.
Рассмотрим тело массы , находящееся на некоторой высоте над поверхностью Земли. Высоту считаем много меньше земного радиуса. Изменением силы тяжести в процессе перемещения тела пренебрегаем.
Если тело находится на высоте , то потенциальная энергия тела по определению равна:
где - ускорение свободного падения вблизи поверхности Земли.
Высоту не обязательно отсчитывать от поверхности Земли. Как мы увидим ниже (формулы (3) , (4) ), физическим смыслом обладает не сама по себе потенциальная энергия, но её изменение. А изменение потенциальной энергии не зависит от уровня отсчёта. Выбор нулевого уровня потенциальной энергии в конкретной задаче диктуется исключительно соображениями удобства.
Найдём работу, совершаемую силой тяжести при перемещении тела. Предположим, что тело перемещается по прямой из точки , находящейся на высоте , в точку , находящуюся на высоте (рис. 3 ).
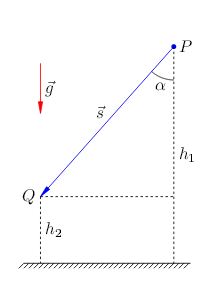 |
| Рис. 3.A=mg(h1-h2) |
Угол между силой тяжести и перемещением тела обозначим . Для работы силы тяжести получим:
Но, как видно из рис. 3 , . Поэтому
. (3)
Учитывая, что , имеем также:
. (4)
Можно доказать, что формулы (3) и (4) справедливы для любой траектории, по которой тело перемещается из точки в точку , а не только для прямолинейного отрезка.
Работа силы тяжести не зависит от формы траектории, по которой перемещается тело, и равна разности значений потенциальной энергии в начальной и конечной точках траектории. Иными словами, работа силы тяжести всегда равна изменению потенциальной энергии с противоположным знаком. В частности, работа силы тяжести по любому замкнутому пути равна нулю.
Сила называется консервативной , если при перемещении тела работа этой силы не зависит от формы траектории, а определяется только начальным и конечным положением тела. Сила тяжести, таким образом, является консервативной. Работа консервативной силы по любому замкнутому пути равна нулю. Только в случае консервативной силы возможно ввести такую величину, как потенциальная энергия.
Потенциальна яэнергия деформированной пружины.
Рассмотрим пружину жёсткости . Начальная деформация пружины равна . Предположим,
что пружина деформируется до некоторой конечной величины деформации . Чему равна при этом работа силы упругости пружины?
В данном случае силу на перемещение не умножишь, так как сила упругости меняется в процессе деформации пружины. Для нахождения работы переменной силы требуется интегрирование. Мы не будем приводить здесь вывод, а сразу выпишем конечный результат.
Оказывается, сила упругости пружины также является консервативной. Её работа зависит лишь от величин и и определяется формулой:
Величина
называется потенциальной энергией деформированной пружины (x - величина деформации).
Следовательно,
что полностью аналогично формулам (3) и (4) .
Закон сохранения механической энергии.
Консервативные силы называются так потому, что сохраняют механическую энергию замкнутой системы тел.
Механическая энергия тела равна сумме его кинетической и потенциальной энергий:
Механическая энергия системы тел равна сумме их кинетических энергий и потенциальной энергии их взаимодействия друг с другом.
Предположим, что тело совершает движение под действием силы тяжести и/или силы упругости пружины. Будем считать, что трения нет. Пусть в начальном положении кинетическая и потенциальная энергии тела равны и , в конечном положении - и . Работу внешних сил при перемещении тела из начального положения в конечное обозначим .
По теореме о кинетической энергии
Но работа консервативных сил равна разности потенциальных энергий:
Отсюда получаем:
Левая и правая части данного равенства представляют собой механическую энергию тела в начальном и конечном положении:
Следовательно, при движении тела в поле силы тяжести и/или на пружине механическая энергия тела остаётся неизменной при отсутствии трения. Справедливо и более общее утверждение.
Закон сохранения механической энергии . Если в замкнутой системе действуют только консервативные силы, то механическая энергия системы сохраняется.
При этих условиях могут происходить лишь превращения энергии: из кинетической в потенциальную и наоборот. Общий запас механической энергии системы остаётся постоянным.
Закон изменения механической энергии.
Если между телами замкнутой системы имеются силы сопротивления (сухое или вязкое трение), то механическая энергия системы будет уменьшаться. Так, автомобиль останавливается в результате торможения, колебания маятника постепенно затухают и т. д. Силы трения неконсервативны: работа силы трения очевидным образом зависит от пути, по которому перемещается тело между данными точками. В частности, работа силы трения по замкнутому пути не равна нулю.
Снова рассмотрим движение тела в поле силы тяжести и/или на пружине. Вдобавок на тело действует сила трения, которая за рассматриваемый промежуток времени совершает отрицательную работу . Работу консервативных сил (тяжести и упругости) по-прежнему обозначаем .
Изменение кинетической энергии тела равно работе всех внешних сил:
Но , следовательно
В левой части стоит величина - изменение механической энергии тела:
Итак,при движении тела в поле силы тяжести и/или на пружине изменение механической энергии тела равно работе силы трения. Так как работа силы трения отрицательна,изменение механической энергии также отрицательно: механическая энергия убывает.
Справедливо и более общее утверждение.
Закон изменения механической энергии.
Изменение механической энергии замкнутой системы равно работе сил трения, действующих внутри системы.
Ясно, что закон сохранения механической энергии является частным случаем данного утверждения.
Конечно, убыль механической энергии не противоречит общефизическому закону сохранения энергии. В данном случае механическая энергия превращается в энергию теплового движения частиц вещества и их потенциальную энергию взаимодействия друг с другом, т. е. переходит во внутреннюю энергию тел системы.
Теорема о кинетической энергии формулируется так. Сумма работы всех сил (консервативных и неконсервативных), приложенных к телу, равна приращению его кинетической энергии. С помощью этой теоремы можно обобщить закон сохранения механической энергии на случай незамкнутой (неизолированной) системы : приращению полной механической энергии системы равно работе сторонних сил над системой.
Траектория
Траекторией называется воображаемая линия, описываемая телом при движении. В зависимости от формы траектории движения бывают криволинейные и прямолинейные. Примеры криволинейного движения: движение тела, брошенного под углом к горизонту (траектория – парабола), движение материальной точки по окружности.
Трение
Возникает между двумя телами в плоскости соприкосновения их поверхностей и сопровождается диссипацией (рассеиванием) энергии. Механическая энергия системы, в которой есть трение, может только уменьшаться. Наука, изучающая трение, называется трибологией. Опытным путем установлено, что максимальная сила трения покоя и сила трения скольжения не зависит от площади соприкосновения тел и пропорциональна силе нормального давления, прижимающей поверхности друг к другу. Коэффициент пропорциональности при этом называется коэффициентом трения (покоя или скольжения).
Третий закон Ньютона
Третий закон Ньютона - физический закон, в соответствии с которым силы взаимодействия двух материальных точек равны по модулю, противоположны по направлению и действуют вдоль прямой, соединяющей эти точки. Как и прочие законы Ньютона, третий закон справедлив только для инерциальных систем отсчета . Краткая формулировка третьего закона: действие равно противодействию.
Третья космическая скорость
Третья космическая скорость - минимальная скорость , необходимая для того, чтобы космический аппарат, запущенный с Земли, преодолел притяжение Солнца и покинул Солнечную систему. Если бы Земля в момент запуска была неподвижна и не притягивала тело к себе, то третья космическая скорость была бы равна 42 км/с. С учетом скорости орбитального движения Земли (30 км/с) третья космическая скорость равна 42-30 = 12 км/с (при запуске в направлении орбитального движения) или 42+30 = 72 км/с (при запуске в противоположном направлении). Если учесть еще и силу притяжения к Земле, то для третьей космической скорости получим значения от 17 до 73 км/с.
Ускорение
Ускорение - векторная величина, характеризующая быстроту изменения скорости . При произвольном движении ускорение определяется как отношение приращения скорости к соответствующему промежутку времени. Если устремить этот промежуток времени к нулю, получим мгновенное ускорение. Значит, ускорение есть производная от скорости по времени. Если рассматривается конечный промежуток времени Δt, то ускорение называется средним. При криволинейном движении полное ускорение складывается из тангенциального (касательного) и нормального ускорения .
Угловая скорость
Угловая скорость - векторная величина, характеризующая вращательное движение твердого тела и направленная по оси вращения согласно правилу правого винта. Средняя угловая скорость численно равна отношению угла поворота к соответствующему промежутку времени. Взяв производную от угла поворота по времени, получим мгновенную угловую скорость. Единицей угловой скорости в СИ является рад/с.
Ускорение свободного падения
Ускорение свободно падающего тела - ускорение, с которым движется тело под действием силы тяготения. Ускорение свободного падения одинаково для всех тел, независимо от их массы . На Земле ускорение свободно падающего тела зависит от высоты над уровнем моря и от географической широты и направления к центру Земли. На широте 45 0 и на уровне моря ускорение свободно падающего тела g = 9.80665 м/с 2 . В учебных задачах обычно полагают g = 9,81 м/с 2 .
Физический закон
Физический закон - необходимая, существенная и устойчиво повторяющаяся связь между явлениями, процессами и состояниями тел. Познание физических законов составляет основную задачу физической науки.
50. Физический маятник
Физический маятник - абсолютно твердое тело , имеющее ось вращения. В поле тяготения физический маятник может совершать колебания около положения равновесия, при этом массу системы нельзя считать сосредоточенной в одной точке. Период колебаний физического маятника зависит от момента инерции тела и от расстояния от оси вращения до центра масс .
Энергия (от греч. energeia – деятельность)
Энергия - скалярная физическая величина, являющаяся общей мерой различных форм движения материи и мерой перехода движения материи из одних форм в другие. Основные виды энергии: механическая, внутренняя, электромагнитная, химическая, гравитационная, ядерная. Одни виды энергии могут превращаться в другие в строго определенных количествах (см. также Закон сохранения и превращения энергии ).
Термодинамика и молекулярная физика
Скалярная величина Т, равная сумме кинетических энергий всех точек системы, называется кинетической энергией системы.
Кинетическая энергия является характеристикой поступательного и вращательного движения системы. На ее изменение влияет действие внешних сил и так как она является скаляром, то не зависит от направления движения частей системы.
Найдем кинетическую энергию при различных случаях движения:
1. Поступательное движение
Скорости всех точек системы равны скорости центра масс . Тогда
Кинетическая энергия системы при поступательном движении равна половине произведения массы системы на квадрат скорости центра масс.
2. Вращательное движение (рис. 77)
Скорость любой точки тела: . Тогда
![]()
или используя формулу (15.3.1):
![]()
Кинетическая энергия тела при вращении равна половине произведения момента инерции тела относительно оси вращения на квадрат его угловой скорости.
3. Плоскопараллельное движение
При данном движении кинетическая энергия складывается из энергии поступательного и вращательных движений
Общий случай движения дает формулу, для вычисления кинетической энергии, аналогичную последней.
Определение работы и мощности мы сделали в параграфе 3 главы 14. Здесь же мы рассмотрим примеры вычисления работы и мощности сил действующих на механическую систему.
1. Работа сил тяжести
. Пусть , координаты начального и конечного положения точки k тела. Работа силы тяжести действующих на эту частицу веса будет ![]() . Тогда полная работа:
. Тогда полная работа:
где Р - вес системы материальных точек, - вертикальное перемещение центра тяжести С.
2. Работа сил, приложенных к вращающемуся телу .
Согласно соотношению (14.3.1) можно записать , но ds согласно рисунку 74, в силу бесконечной малости можно представить в виде ![]() - бесконечно малый угол поворота тела. Тогда
- бесконечно малый угол поворота тела. Тогда
Величина ![]() называется вращающим моментом.
называется вращающим моментом.
Формулу (19.1.6) перепишем как
Элементарная работа равна произведению вращательного момента на элементарный поворот .
При повороте на конечный угол имеем:

Если вращательный момент постоянен , то
а мощность определим из соотношения (14.3.5)
как произведение вращающего момента на угловую скорость тела.
Теорема об изменении кинетической энергии доказанная для точки (§ 14.4) будет справедлива для любой точки системы

Составляя такие уравнения для всех точек системы и складывая их почленно получаем:

или, согласно (19.1.1):
что является выражением теоремы о кинетической энергии системы в дифференциальной форме.
Проинтегрировав (19.2.2) получаем:
Теорему об изменении кинетической энергии в конечном виде: изменение кинетической энергии системы при некотором ее конечном перемещении равно сумме работ на этом перемещении всех приложенных к системе внешних и внутренних сил.
Подчеркнем, что внутренние силы не исключаются. Для неизменяемой системы сумма работ всех внутренних сил равна нулю и
Если связи, наложенные на систему, не изменяются со временем, то силы, как внешние так и внутренние, можно разделить на активные и реакции связей, и уравнение (19.2.2) теперь можно записать:
В динамике вводится такое понятие как "идеальная" механическая система. Это такая система, наличие связей у которой не влияет на изменение кинетической энергии, то есть
Такие связи, не изменяющиеся со временем и сумма работ которых на элементарном перемещении равна нулю, называются идеальными, и уравнение (19.2.5) запишется:
Потенциальной энергией материальной точки в данном положении М называется скалярная величина П, равная той работе, которую произведут силы поля при перемещении точки из положения М в нулевое
П = А (мо) (19.3.1)
Потенциальная энергия зависит от положения точки М, то есть от ее координат
П = П(х,у,z) (19.3.2)
Поясним здесь, что силовым полем называется часть пространственного объема, в каждой точке которого на частицу действует определенная по модулю и направлению сила, зависящая от положения частицы, то есть от координат х, у, z. Например, поле тяготения Земли.
Функция U от координат, дифференциал которой равен работе, называется силовой функцией . Силовое поле, для которого существует силовая функция, называется потенциальным силовым полем , а силы действующие в этом поле, - потенциальными силами .
Пусть нулевые точки для двух силовых функций П(х,у,z) и U(x,y,z) совпадают.
По формуле (14.3.5) получаем , т.е. dA = dU(x,y,z) и

где U - значение силовой функции в точке М. Отсюда
П(x,y,z) = -U(x,y,z) (19.3.5)
Потенциальная энергия в любой точке силового поля равна значению силовой функции в этой точке, взятому с обратным знаком.
То есть, при рассмотрении свойств силового поля вместо силовой функции можно рассматривать потенциальную энергию и, в частности, уравнение (19.3.3) перепишется как
Работа потенциальной силы равна разности значений потенциальной энергии движущейся точки в начальном и конечном положении.
В частности работа силы тяжести:
Пусть все силы, действующие на систему, будут потенциальными. Тогда для каждой точки k системы работа равна
Тогда для всех сил, как внешних, так и внутренних будет
где - потенциальная энергия всей системы.
Подставляем эти суммы в выражение для кинетической энергии (19.2.3):
или окончательно:
При движении под действием потенциальных сил сумма кинетической и потенциальной энергии системы в каждом ее положении остается величиной постоянной. Это закон сохранения механической энергии.
Груз массой 1 кг совершает свободные колебания согласно закону х = 0,1sinl0t. Коэффициент жесткости пружины с = 100 Н/м. Определить полную механическую энергию груза при х = 0,05м, если при х= 0 потенциальная энергия равна нулю  . (0,5)
. (0,5)
Груз массой m = 4 кг, опускаясь вниз, приводит с помощью нити во вращение цилиндр радиуса R = 0,4 м. Момент инерции цилиндра относительно оси вращения I = 0,2 . Определить кинетическую энергию системы тел в момент времени, когда скорость груза v = 2м/с  . (10,5)
. (10,5)
Под элементарной работой dА, совершаемой силой на элементарном перемещении , называют величину, равную скалярному произведению на
где угол a - угол между векторами силы и перемещением (рис.1.22,а);
Модуль вектора элементарного перемещения или элементарный путь пройденной точкой приложения силы.

Работа силы на конечном перемещении равна сумме элементарных работ:
 . (1.61)
. (1.61)
Если сила постоянна ( =const), то ее работа на прямолинейном участке длины l запишется следующим образом:
![]() . (1.62)
. (1.62)
Работа силы может быть положительной, отрицательной или равной нулю. Так, работы постоянных сил, приложенных к телу (рис.1.22б) на горизонтальном участке пути l, равны:
Чтобы ввести понятие о кинетической энергии W k тела, запишем элементарную работу dA силы в другом виде (см. 1.2.2):
Тогда для работы силы , переводящей тело из состояния 1 (скорость тела ) в состояние 2 (скорость тела ) можно записать:
Из полученной формулы следует, что работа силы равна разности двух величин, определяющих начальное (скорость ) и конечное (скорость ) состояния тела. При этом условия перехода из состояния 1 в состояние 2 не оказывают влияние на записанное выражение. Поэтому можно ввести функцию состояния тела, его кинетическую энергию W к как СФВ, характеризующую способность тела совершать работу за счет изменения скорости его движения и равную
В этом выражении постоянную величину выбирают, предположив, что при нулевой скорости движения тела его кинетическая энергия равна нулю, поэтому
Кинетическая энергия тел не зависит от того, как была достигнута данная скорость u, она является функцией состояния тела, положительной величиной, зависящей от выбора системы отсчета.
Введение W к позволяет сформулировать теорему о кинетической энергии, согласно которой алгебраическая сумма работ всех сил, действующих на тело, равна приращению кинетической энергии тела:
Эта теорема широко используется для анализа взаимодействия тел не только в механике, но и в других разделах курса физики, таких как электростатика, постоянный ток, электромагнетизм, колебания и волны и т.д.
1.4.2. Кинетическая энергия вращающегося а.т.т.
Возьмем а.т.т., вращающееся вокруг неподвижной оси с угловой скоростью (рис.1.16,б). Представим тело в виде совокупности м.т. массы dm , тогда для кинетической энергии тела можно записать:
Итак, кинетическая энергия а.т.т. вращающегося относительно неподвижной оси вращения, определяется по формуле
Если тело одновременно участвует в поступательном (плоском) и вращательном движениях (например, движение цилиндра без скольжения по плоскости, рис.1.23,а), то его кинетическую энергию можно получить
 Рис.1.23
Рис.1.23
как сумму кинетической энергии поступательного движения тела вместе с осью вращения, проходящей через его центр масс (точка О ), со скоростью и вращательного движения тела относительно этой оси с угловой скоростью
 .
(1.67)
.
(1.67)
Для сплошного (I 1 =1/2mR 2 ) и тонкостенного (I 2 =mR 2 ) цилиндров одинаковой массы m и радиуса R кинетические энергии запишутся таким образом:
 .
.
Полученные формулы для кинетической энергии цилиндров позволяют объяснить опыт по различию времени их скатывания с наклонной плоскости высотой h и длиной l (рис.1.23,б). Так, согласно закону сохранения энергии (силой трения при движении цилиндров практически можно пренебречь) получим
 ,
,
где обозначают скорости сплошного и полого цилиндров у основания наклонной плоскости.
При скатывании цилиндров центр их масс движется равноускоренно без начальной скорости и поэтому согласно формуле (1.13) можно записать:
 ,
,
т.е. на скатывание полого цилиндра требуется большее время, чем для сплошного цилиндра.
Качественно это можно объяснить тем, что полый цилиндр является более инертным, чем сплошной (для него момент инерции относительно оси вращения больше), и поэтому он медленнее изменяет свою скорость и поэтому тратит больше времени на скатывание с наклонной плоскости.
Как видно из рис.1.23,а, модули скоростей точек на поверхности цилиндра будут разными (u В =0, , u А =2u) в связи с тем, что эти точки участвуют одновременно и в поступательном и в вращательном движениях со скоростями и , причем для каждой точки направлена по касательной к поверхности цилиндра и равна по модулю u ( ).
Отметим, что движение цилиндра можно рассматривать и как ряд последовательных вращений вокруг мгновенной оси, проходящей через точку С (рис.1.23,а) с угловой скоростью w. Причем и в этом случае кинетическая энергия тела также определяется формулой (1.67).
